In the early days of mapping and cartography experiments, GPS tracks were often the starting point. Contributors to the OpenStreetMap (OSM) project, especially before 2010, relied heavily on GPS devices. They would walk or cycle routes and later upload their recorded tracks and observations to OSM. Today, GNSS-capable devices are everywhere: smartphones, smartwatches, action cams, and drones. These tools don’t just record where things are, but also what they are, through images, videos, and other sensor inputs. This opens up new possibilities for mobile mapping. I recently tried something new: drone-based tracking in Active Mode—a self-experiment in modern mobile mapping.

What did the test setup look like, and which devices were used? For my tests mapping various paths and (MTB) trails, I used a range of devices and configurations. I flew two drones: the DJI Avata (2024) and the DJI NEO (2024). For the action cam, I used a GoPro HERO 12 Black, and I also wore a Garmin fēnix® 8 smartwatch. My overall goal was to evaluate the GPS accuracy of these different devices. The tests were conducted on closed-off field and forest paths. Differentiating between open terrain, wooded trails, and steep sections helped account for potential signal interference from satellite shading.
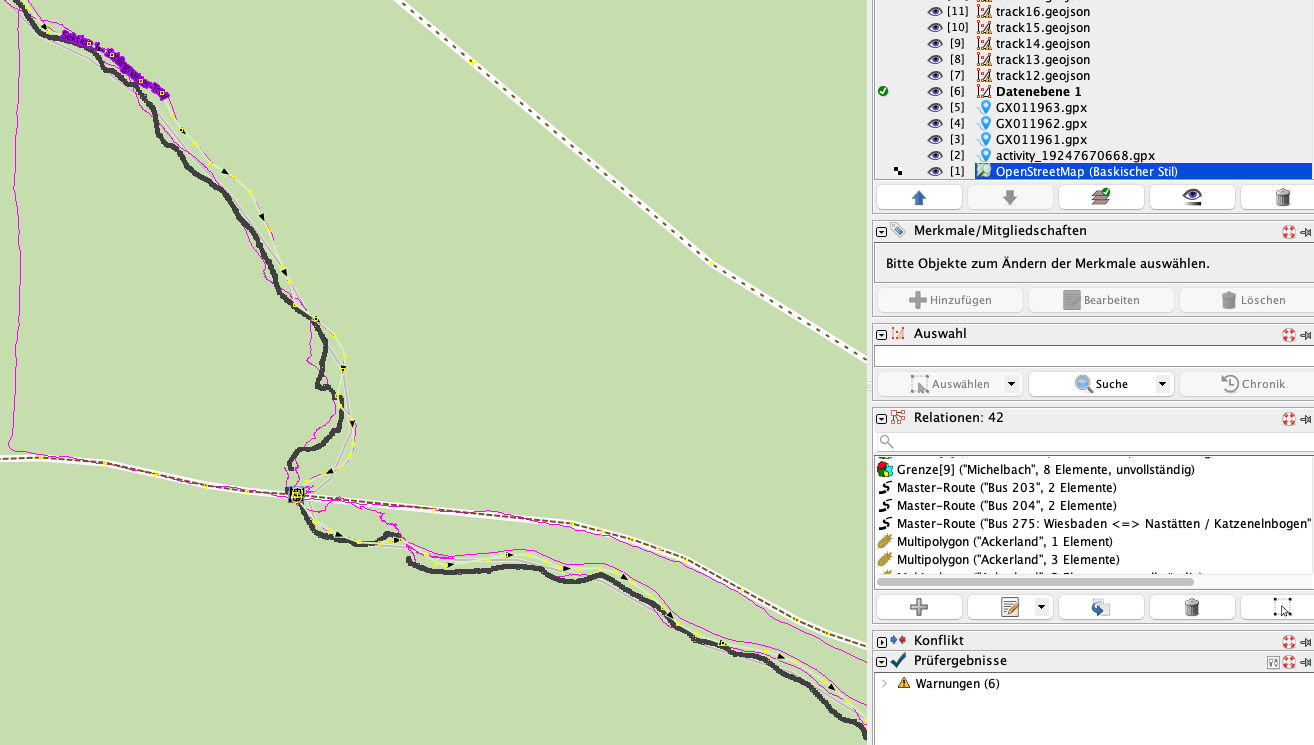
How can the relevant data be accessed? The GPS tracks from the DJI drones can be exported from their log files, found in the DJIFlightRecord directory of the DJI Fly App (on iOS, in my case). I used the free tool dji-log-parser to extract the GPS data. To extract the GPS track from GoPro video footage (using GPMF metadata), I used the Python package gpmf. Below is a screenshot from JOSM (an OSM editor), showing part of the recorded GPS tracks for a test route. During the test, the GoPro and Garmin watch were worn by the person. The NEO drone followed the person in Active Tracking mode, while the Avata was flown separately using FPV.
What results did these first tests yield? Both the Avata and the NEO provided GPS tracks, but compared to the “reference” route, deviations of several meters were common. The tracking mode itself influenced the recorded path, especially when the drone followed from behind or at an angle. The GoPro produced similar results, with tracks that were sometimes even farther off than the drones. In contrast, the Garmin watch delivered the most “accurate” and consistent GPS data in my forest-area tests.
My personal conclusion? A drone in tracking mode is great for YouTube videos, but due to GPS accuracy limitations, it’s only conditionally suitable for direct mobile mapping, at least with the drones I tested and at my running or cycling speeds. I was a bit disappointed by the GoPro’s positioning accuracy; I expected better performance given its capabilities. The biggest surprise? The Garmin watch—its GPS track was by far the most reliable throughout my experiments.
Side Note: The DJI Mini 4 Pro, an Insta360 One RS, and a DJI Osmo were also partially used during the tests. However, due to the Mini 4 Pro’s size and the lack of GPS in the Insta360, I haven’t included them in detail here. Otherwise, this post would have gotten way too long 😉
PS: The mapped MTB trails from the FlowTrail Heidenrod can now be found on OSM 👉 Relation
Leave a Reply